In recent years, online gaming has become one of the most popular Internet activities, but cheating activity, such as the use of game bots, has increased as a consequence. Generally, the gaming community disagrees with the use of game bots, as bot users obtain unreasonable rewards without corresponding efforts. However, bots are hard to detect because they are designed to simulate human game playing behavior and they follow game rules exactly. Existing detection approaches either interrupt the players' gaming experience, or they assume game bots are run as standalone clients or assigned a specific goal, such as aim bots in FPS games.
In this paper, we propose a trajectory-based approach to detect game
bots. It is a general technique that can be applied to any game in which
the avatar's movement is controlled directly by the players. Through
real-life data traces, we show that the trajectories of human players
and those of game bots are very different. In addition, although game
bots may endeavor to simulate players' decisions, certain human behavior
patterns are difficult to mimic because they are AI-hard. Taking Quake 2
as a case study, we evaluate our scheme's performance based on real-life
traces. The results show that the scheme can achieve a detection
accuracy of 95% or higher given a trace of 200 seconds or longer.
Key words: Cheating Detection, Online Games,
Quake, Security, Supervised Classification, User Behavior
1 Introduction
In recent years, online gaming has become one of the most popular Internet
activities. However, as the population of online gamers has increased, game cheating
problems, such as the use of game bots, have become more serious. Game bots are automated programs with
artificial intelligence that players use for different purposes. In MMORPGs (Massively Multiplayer Online Role Player Games),
players can save a great deal of time by using bots to perform repetitive tasks, such as
slashing low-level monsters, or fishing in a river to master the
avatar's fishing skills. In FPS (First-Person Shooter) games, users can
employ bots to play in place of themselves in order to get high scores and
gain a reputation in the community.
Generally, the gaming community disagrees with the use of game bots, as
bot users obtain unreasonable rewards without corresponding efforts.
However, game bots are hard to detect because they are designed to
simulate human game playing behavior and they follow game rules
exactly. Some bot detection studies [1,2]
propose using CAPTCHA tests during a game to determine whether an avatar
is actually controlled by a person. Although this method is effective,
it interrupts the game play and degrades players' feelings of immersion
in the virtual world [3,4]. Alternatively,
passive detection approaches, such as schemes based on traffic
analysis [5,6] and schemes based on avatars'
shooting accuracy in FPS games [7], can be used. The former
approach assumes that a game bot works as a standalone client, and the
latter is only valid for detecting aim bots in shooting games.
In this paper, we propose a general approach for all genres of
games where players control the avatar's movement directly. Our
approach is based on the avatar's movement trajectory during a
game. The rationale is that the trajectory of the avatar
controlled by a human player is hard to simulate. Players control the
movement of avatars based on their knowledge, experience, intuition, and
a great deal of information provided in the game. Since human decisions
may not always be logical and efficient, how to model and simulate
realistic movements is still an open question in the AI field. To
distinguish human players from game bots efficiently, we analyze the
trajectories of both player types and distinguish between the
trajectories according to their spatial and temporal
characteristics. We choose Quake 2 as our case study because it is a
classic and popular FPS game, and many real-life human traces are
available on the Internet. Therefore, we can use such traces to validate
our proposed scheme.
The contribution of this paper is two-fold. 1) We propose a
trajectory-based approach for detecting game bots. It is a general model
that can be applied to any game in which the avatar's movement is
controlled by the players directly. 2) Using real-life human traces, the
performance evaluation results show that the scheme can achieve a
detection accuracy of 95% or higher when the trace length is 200
seconds or longer. Because it is difficult to simulate human players'
logic when they control game characters, we believe this approach has
the potential to distinguish between human players and automated
programs and thus merits further investigation.
The remainder of this paper is organized as follows.
Section 2 contains a review of related works. In
Section 3, we introduce our game case study, Quake 2, and
describe the game trace collection methodology. We analyze the
similarities and differences between the trajectories of different types
of players in Section 4. In Section 5, we
propose an identification scheme and demonstrate its ability in terms of
the distribution of discriminative features. In Section 6,
we evaluate the performance of the proposed scheme with the
consideration of the trace length. Then, in
Section 7, we summarize our conclusions.
2 Related Work
Recently, anti-cheating software programs, such as PunkBuster and
GameGuard,
have been widely deployed in online games to prevent cheating. Such
software is bundled with game clients, so it cannot be uninstalled even
if the game client has been removed. It works by hiding in the game
client process, monitoring the entire virtual memory space (to prevent
modification of the game's executable images), blocking suspected
programs that might be hacker tools, and blocking certain API calls.
This kind of software can detect nearly all plug-in tools that attach to
a game client program to inspect or modify game states when the game is
running. Unfortunately, it cannot stop the widespread use of standalone
bots, including the bot series we study in this paper. The reason is
that these anti-cheating software programs are host-based, so they must
be installed on players' PCs to be effective. Standalone bots, on the
other hand, can function without clients, and it is unlikely that
anti-cheating tools would be installed on PCs where the bots are
running. This claim is strongly supported by the fact that game bots are
still active in games protected by PunkBuster or GameGuard, e.g., Quake
(PunkBuster) and
Lineage2 (GameGuard).
3 Data Description
3.1 Human Traces
Quake 2 supports a game-play recording function that keeps track of
every action and movement, as well as the status of each character and item throughout the game. With a recorded trace, one can reconstruct a game and review it from any position and angle desired via VCR-like operations. Players often use this function to assess their performance and combat strategies. Moreover, experienced players are encouraged to publish their game-play
traces as teaching materials for novice gamers and thereby build a reputation in
the community.
To ensure that our game traces represented the diversity of Quake
players, we only used traces that players had contributed voluntarily.
The human players' traces were downloaded from the following archive
sites: GotFrag
Quake3, Planet
Quake4, Demo
Squad5, and Revilla Quake
Site6.
We restricted the traces to the map The Edge, one of the most
well-known levels of death-match play. On this map, the only goal is
that each player should kill as many other players as possible, until
the time limit is reached. Because short traces contain little
information, we only collected traces longer than 600 seconds.
3.2 Bot Traces
There are many game bots available for Quake 2. For this study, we
selected three of the most popular bot programs for trace collection, namely CR
BOT 1.14 [8], Eraser Bot 1.01 [9], ICE Bot
1.0 [10].
We collected 1,306 hours of traces in total, as shown in
Table 1. In CR Bot and Eraser Bot, all human players and
bots were active most of time ( ≥ 90%). There was less activity in
ICE Bot because it often remained idle in some places waiting for an
opportunity to ambush other players.
Table 1: Trace Summary
name
num
mean
total
active
1
Human
93
2 hour
203.5 hour
91%
2
CR
24
19 hour
448.8 hour
91%
3
Eraser
15
20 hour
296.4 hour
94%
4
ICE
18
20 hour
358.8 hour
67%
4 Discriminative Analysis
In this section, we compare the avatar trajectories of human players and
game bots. First, we compare the navigation patterns of the two player
types and consider their individual trajectories. We then identify the
most significant discriminative characteristics of the respective
trajectories and incorporate them into the proposed bot identification
scheme.
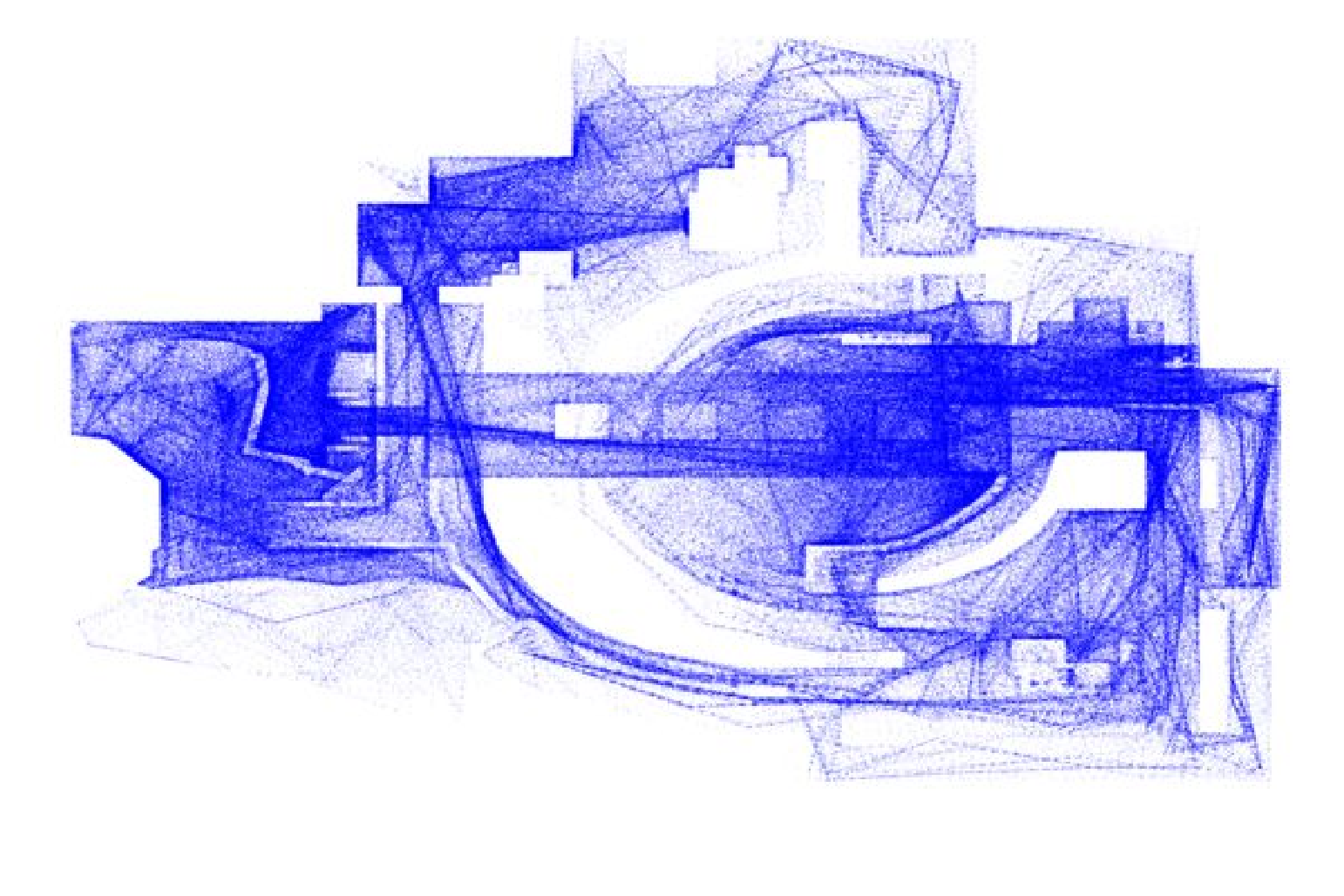
We construct the aggregated navigation pattern of each player type by
plotting all the observed coordinates in all traces of the particular
player type on a graph, as shown in Fig. 1.
The areas of high density in each figure are the places that players
visit more frequently, while the sparse areas represent buildings or
other types of obstacles that players cannot pass. The figures show that
the game level is formed by squares, plazas, and narrow corridors. This
arrangement is designed specifically for death-match play, as the winding
routes provide cover for players to hide, and the narrow corridors lead
to intense fighting if players confront each other in these places. We
observe that, even though all the movement traces were collected on the
same map, the navigation patterns of different player types are
dissimilar. We summarize the differences below.
Human players tended to explore all areas on the map; thus,
Fig. 1(a) shows the most complete terrain of the level. In
contrast, the routing algorithms of game bots may have had difficulty
navigating to some places, so they never visited some parts of the map.
For example, the bottom left-hand corner of the CR Bot navigation map in
Fig. 1(b) does not indicate the presence of bots.
To reduce the probability of being attacked, human players normally avoid open spaces. Therefore, in
Fig. 1(a) we observe that human players avoided the plaza in the middle of the map, and stayed in the surrounding corridors instead. This is indicated by the high density of plots in the corridors. In contrast, game bots often stay in the central plaza, probably because it occupies a large space and it is easy to get everywhere from this area.
Even though human players spend most of their time in narrow areas
and confined rooms, there are large variations in their trajectories.
There are two reasons for this phenomenon. 1) The width of the main
routes is quite large. Rather than stay in the middle of a route,
players move irregularly within the limited space. This may be due to
players' preferences; hence, some players may move along the wall of the
path, while others may walk straight, unless the avatar is blocked by a
wall or other obstacles. 2) As fights may occur anytime-anywhere, human
players often move strategically to dodge current or potential attacks.
On the other hand, we find that different game bots adopt very different
movement patterns over the routes. The movement paths of CR Bot and
Eraser Bot (Fig. 1(b) and Fig. 1(c) respectively)
are dense and easy to see. This suggests that these bots tend to follow
exact movement patterns when moving through the same corridor. In
contrast, ICE Bot (Fig. 1(d)) exhibits a nearly uniform
distribution over all possible points on the map. This implies that its
routing algorithm decides the avatar's direction rather than its exact
movement pattern, so that the probabilities of all points on the route
are roughly equivalent.
Clearly, there are substantial differences between the aggregated
navigation patterns of human players and those of each game bot because
the bots' routing patterns are very different from the movement behavior
exhibited by human players.
5 Bot Detection Scheme
Our objective is to classify human players and game bots efficiently and
accurately. To this end, we integrate the spatial and temporal
differences in the trajectories of avatars controlled by different
player types to develop a bot identification scheme. In this section, we
first describe the set of discriminative features extracted from the
avatar trajectories, and then explain how we use the features to
classify game bots and human players.
5.1 Feature Extraction
Given a segment of a trajectory, {xt, yt}, 1 ≤ t ≤ T, we extract the following features from this two-dimensional time series.
5.1.1 1. ON/OFF Activity
First, we note that avatars in the game play do not move all the time.
Sometimes they may stop to check if any opponents are around, wait for
opponents to enter an area, wait for regeneration of their weapons or
ammunition, or simply take a rest. The alternate moving and idle
behavior forms an ON/OFF movement pattern. We define ON periods as
consecutive periods of movement longer than 1 second, and OFF periods
as the remaining time frames. The duration and frequency of ON/OFF
periods are decided by the players' styles and the bots' AI logic. For
example, aggressive players may keep moving all the time, while cautious
players may stay in one place to monitor their surroundings. Therefore,
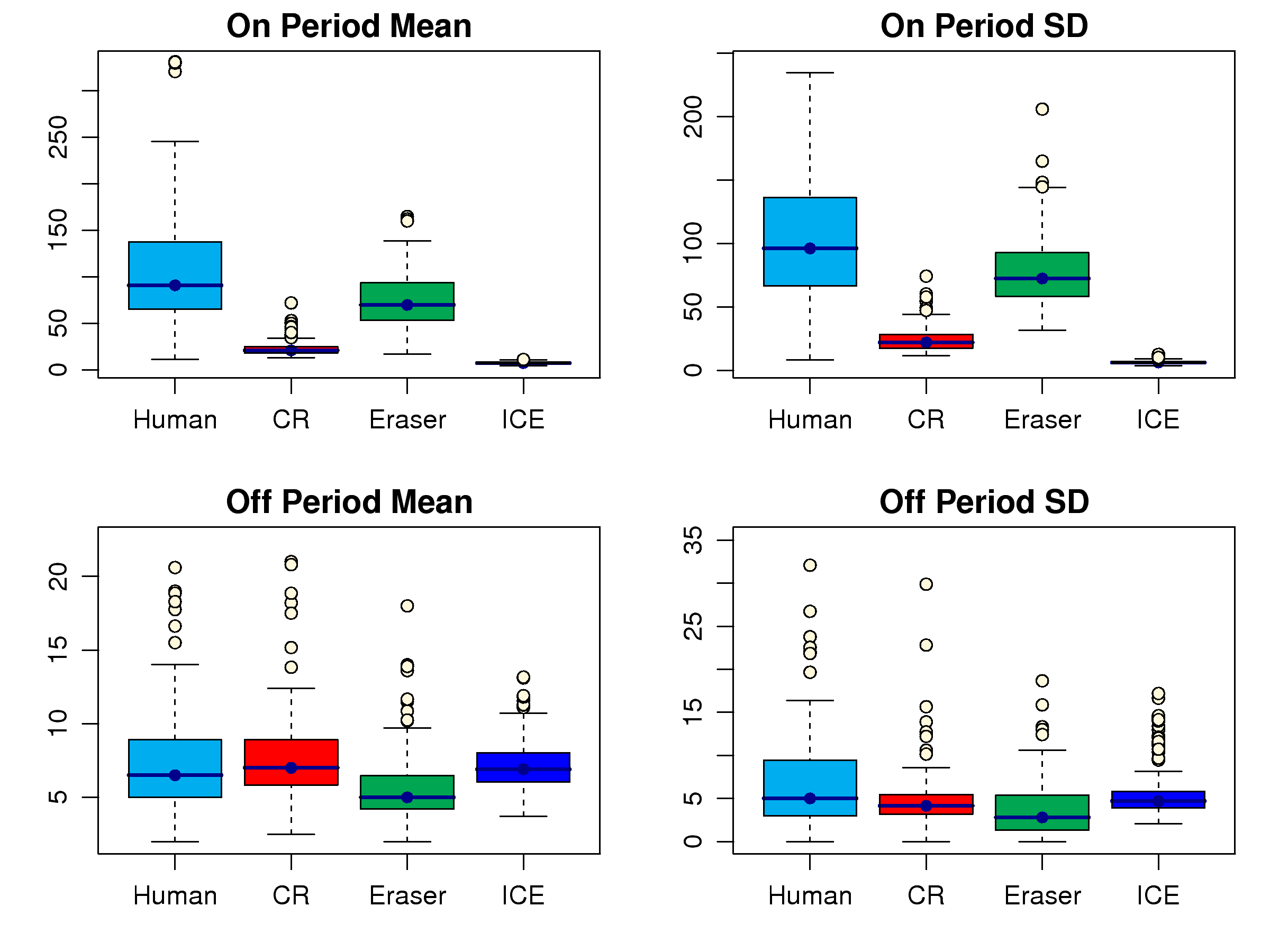
we define four features based on ON/OFF activity: the mean and
standard deviation of ON periods, and those of OFF periods.
Fig. 2 shows the distributions of the four features. The
mean and standard deviation of human players' ON periods are
significantly higher than those of game bots. This indicates that human
players are more aggressive as they tend to move all the time. In
addition, the mean and standard deviation of human players' OFF periods
are longer than those of bots, which implies that human behavior is more
irregular and unpredictable in that they may wait for a longer time
after a long move. The figure shows that human players and game bots
differ in terms of ON/OFF activity. Hence, we believe that the four features based on these
activities could be useful for bot detection.
Figure 2: The distribution of features related to ON/OFF
periods.
5.1.2 2. Pace
In games, avatars are generally allowed to move at different speeds and
in different ways, such as running, slow walking, step-by-step walking,
lateral shifting, and moving backwards. In addition, players can stop
the current movement and proceed with another movement in different
direction in sub-seconds; therefore, the resulting avatar movements can
be highly variable. One simple way to characterize the dynamics of an
avatar's movement is by the pace of its movements. We define the
pace as the displacement of an avatar's coordinate in one second,
and extract the mean and standard deviation of the pace as two
features. We find that the paces of most avatars are generally small,
although they can be large occasionally. To characterize the variability
of paces when players move fast, we also define the "large pace
SD," which is the standard deviation of paces larger than 10 units.
In addition to normal movements, players may teleport their avatars to a
remote place instantly through a teleportation spot. Teleportation may
also be used when an avatar dies. It will be transferred to the rebirth
spot so that its life points can be recharged. We detect teleportation
occurrences by computing if the offset in one second is longer than 60
units and define the feature "teleportation rate" as the average
count of teleportation occurrences recorded in one second.
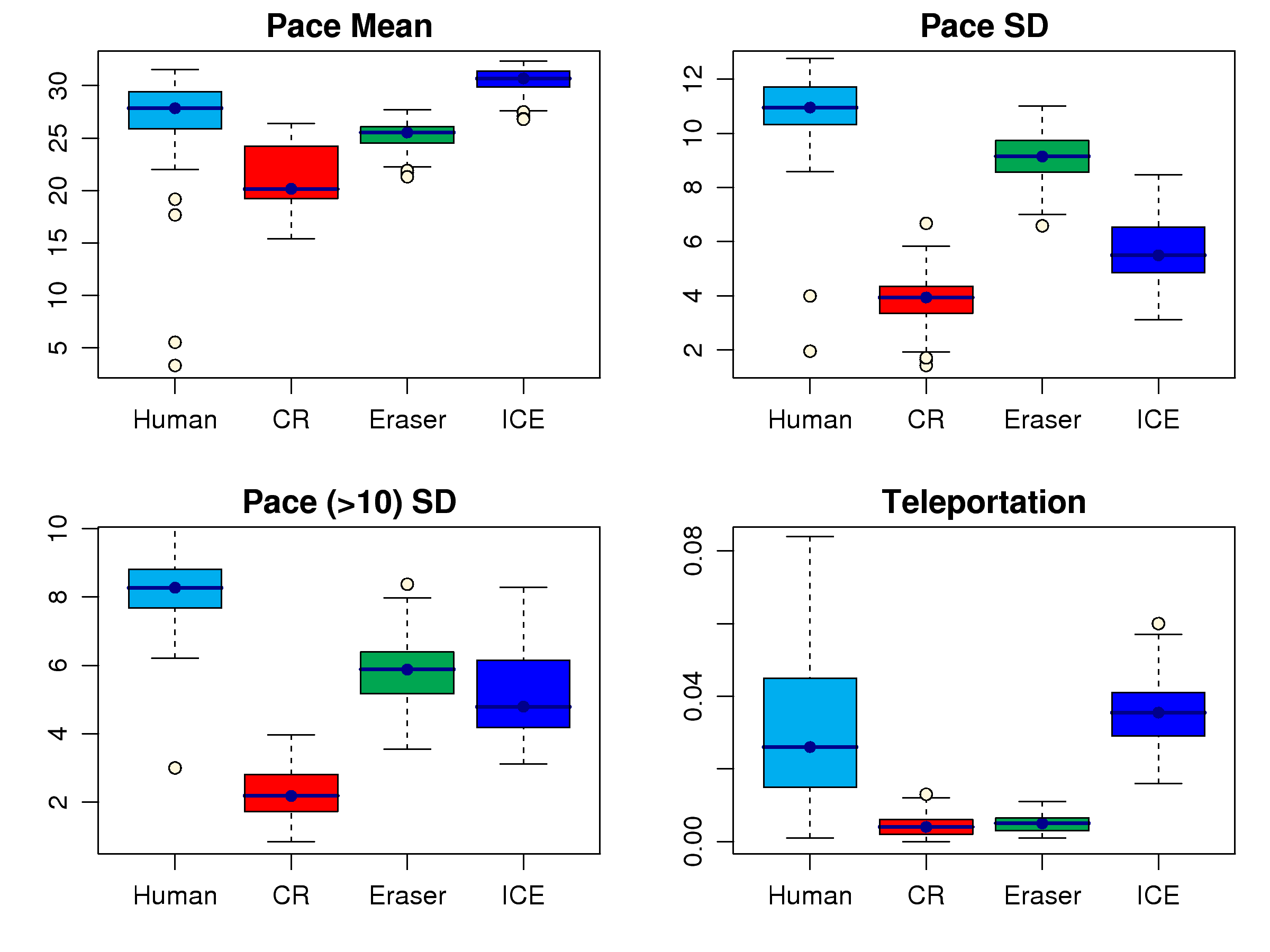
Figure 3: The distribution of features related to movement
pace.
Fig. 3 shows the distribution of the four features related
to the movement pace and teleportation. Although the means of the paces
of different player types are dissimilar, the variations are not large.
This shows that the four player types have different but consistent
micro-movement behavior in small time scales. The standard deviation of
the pace also has large discriminability, where that of human players
and Eraser Bot have similar magnitude. The large standard deviation of
the pace, on the other hand, exhibits great discriminability, which
indicates that human players have even larger pace variability when they
move fast. Finally, CR Bot and Eraser Bot have very low teleportation
frequency. In contrast, human players have moderate teleportation
frequency. Moreover, their variance is high because human players have
different preferences when using teleportation spots and players get
killed at different rates.
5.1.3 3. Path
We also define the following features to characterize the detailed
trajectories of avatars in a game.
Lingering. We consider whether players "lingered" in a small
area during a specific time period. For an avatar at (x,y) at time
t, if its distance from (x,y) was always less than d during the
period (t,t+p), we say that the avatar was lingering during (t,t+p),
given the parameters (d,p). We arbitrarily set d=30 seconds and
p=300 units, as we find that different parameters do not affect the
classification performance significantly.
Smoothness. The "smoothness" feature determines whether an
avatar moves in straight or zig-zag patterns. Assume an avatar is at
(x1,y1) at time t1 and at (x2,y2) at time t2. We define
the smoothness as the number of times the character moves across the
line (x1,y1)−(x2,y2) during the period (t1,t2). As the line
(x1,y1)−(x2,y2) indicates the shortest route between the two
points (x1,y1) and (x2,y2), crossing the line implies that the
player is moving inefficiently. This may be because he is
attempting to dodge gunfire, switch to another target, or simply due to
players' habits or bots' routing algorithms.
Detour. We define another feature "detour" to
quantify the effectiveness of user movements. If an avatar is at
(x1,y1) at time t1 and at (x2,y2) at time t2, we compute the detour by dividing the length of the movement by the effective offset of an avatar during the period (t1,t2).
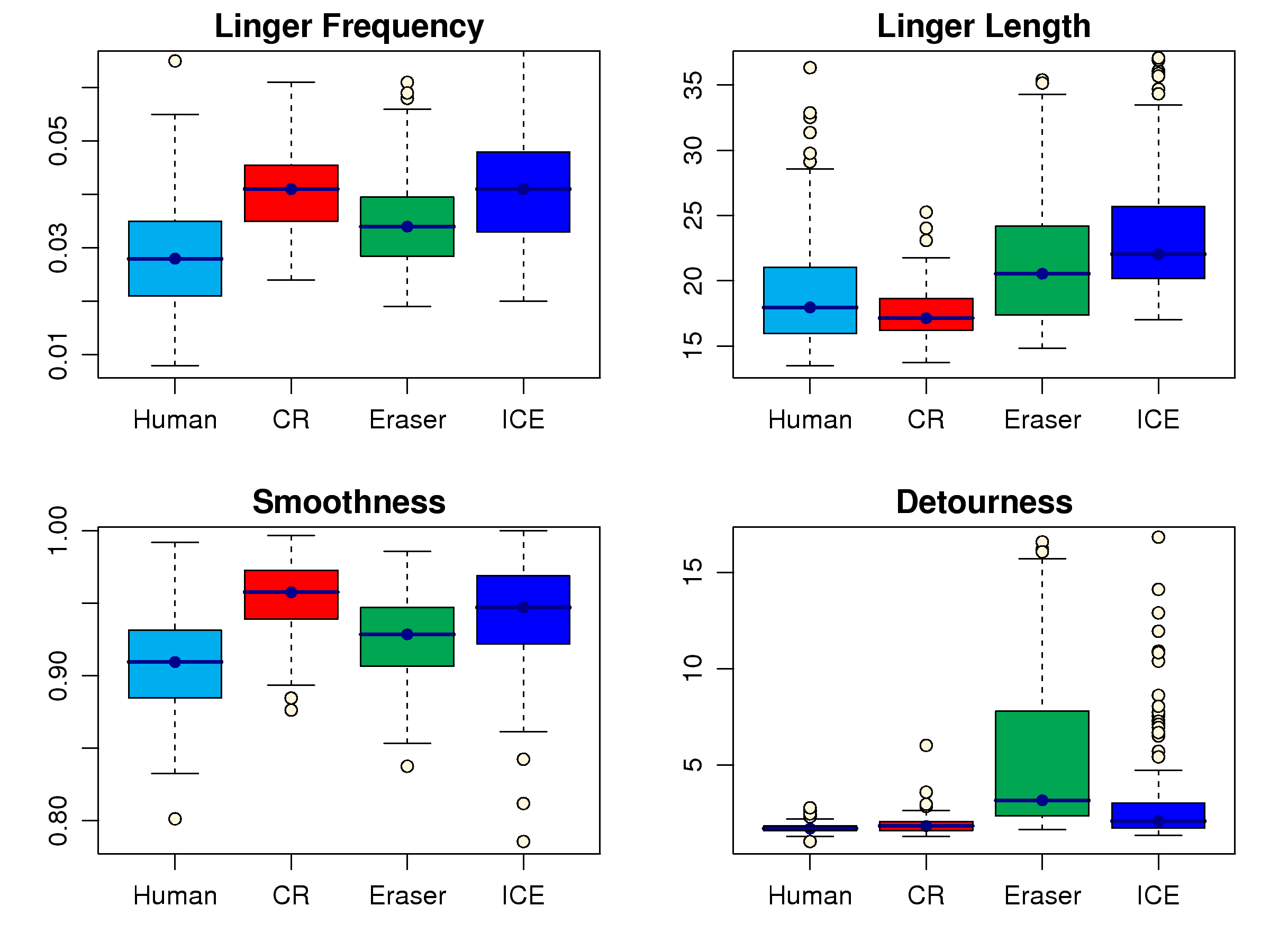
Figure 4: The distribution of features related to movement
path.
The distributions of the above features are plotted in
Fig. 4. The graph shows that the linger frequency and
duration of human players are significantly less than those of game
bots. This is reasonable because lingering in a place for a long time is
a dangerous, as the player may be noticed and induce opponents' fire.
The smoothness of human players is the lowest of the four player types,
which supports the intuition that human players' movements are the most
irregular and unpredictable.
The detour feature shows that Eraser Bot moves very inefficiently in
terms of the avatar's effective offset. In contrast, the movements of
human players are relatively more efficient. We suspect this is because
human players tend to move away from current positions to another
place efficiently even though they may move irregularly and
strategically; thus, the resulting avatar trajectory exhibits both
unpredictability and efficiency which seem contradictory.
5.1.4 4. Turn
Our final set of features is based on the frequency and amplitude of how
avatars change direction. Our rationale is that each time an avatar
changes direction, the magnitude of the change should be dependent on
player conventions and bot routing algorithms.
Assume an avatar is at (x1,y1) at time t, at (x2,y2) at time
t+p, and at (x3,y3) at time t+2p. If the angle between two
vectors (x2−x1,y2−y1) and (x3−x1,y3−y1) is greater than a,
we determine that a turn with angle a occurred. We define three
features to denote the frequency of turns with angles 30°,
60°, and 90°, respectively. In addition, we define a
feature called the "turn angle" to denote the average angle change for
all direction changes greater than 30°.
Figure 5: The distribution of features related to turn
movement.
Fig. 5 shows the distributions of the turn-related
features. We observe that the four player types change direction at
different rates no matter how we define the minimum degree of a
direction change. Notably, the turn frequency of human players is the
highest for the 30° angle and becomes relatively lower for the
90° angle. In addition, the average turn angle of human players
is the lowest among the four types, which indicates that human
players tend to adjust their directions continuously and slightly.
5.2 Classification
We apply a supervised classification framework to train a classifier, which we use to determine whether a segment of an avatar's trajectory belongs to a human player or a game bot. The classifier we adopt is the naive Bayesian classifier without the kernel density estimation. We evaluate the performance of trajectory classification in the next section.
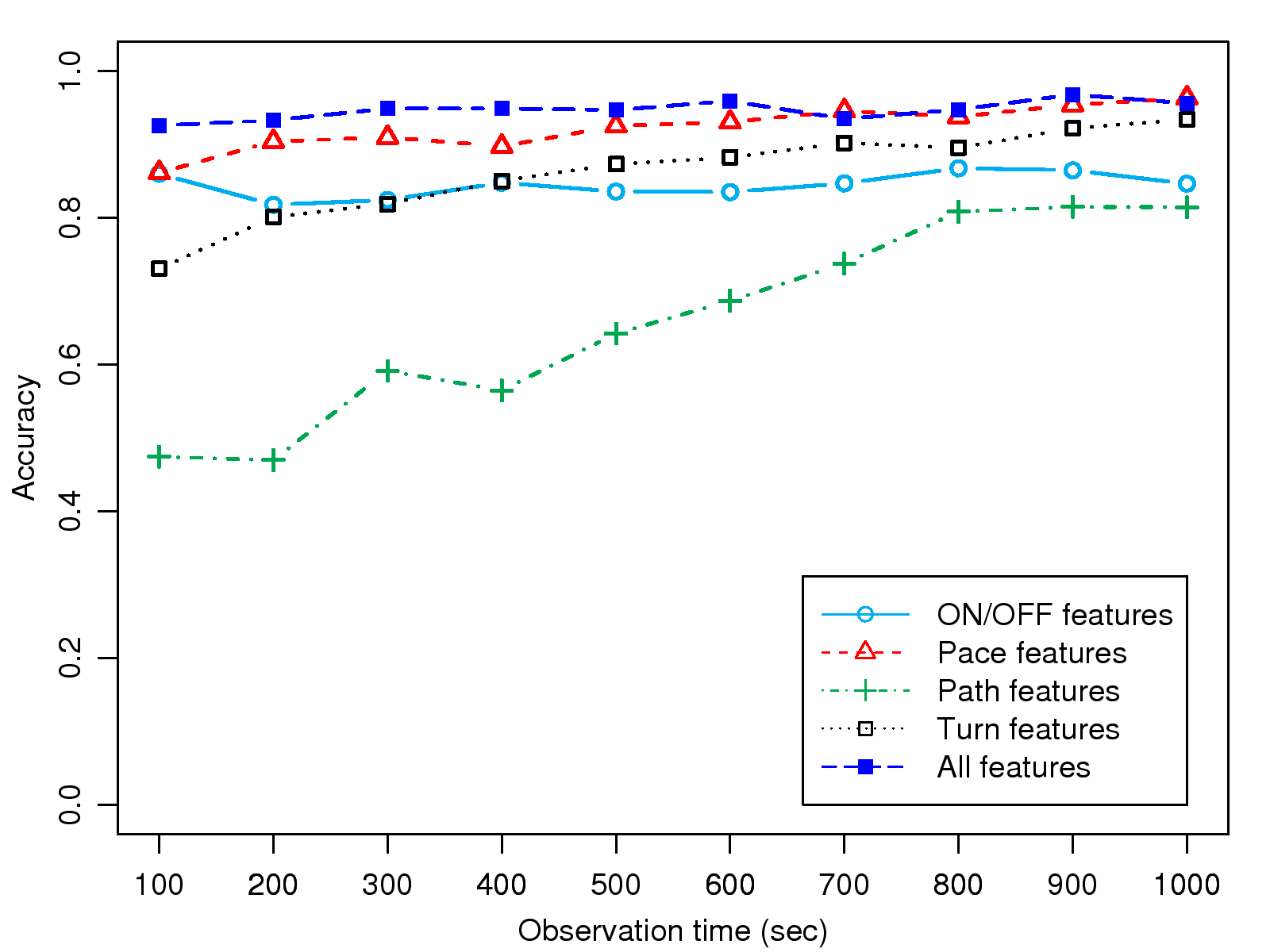
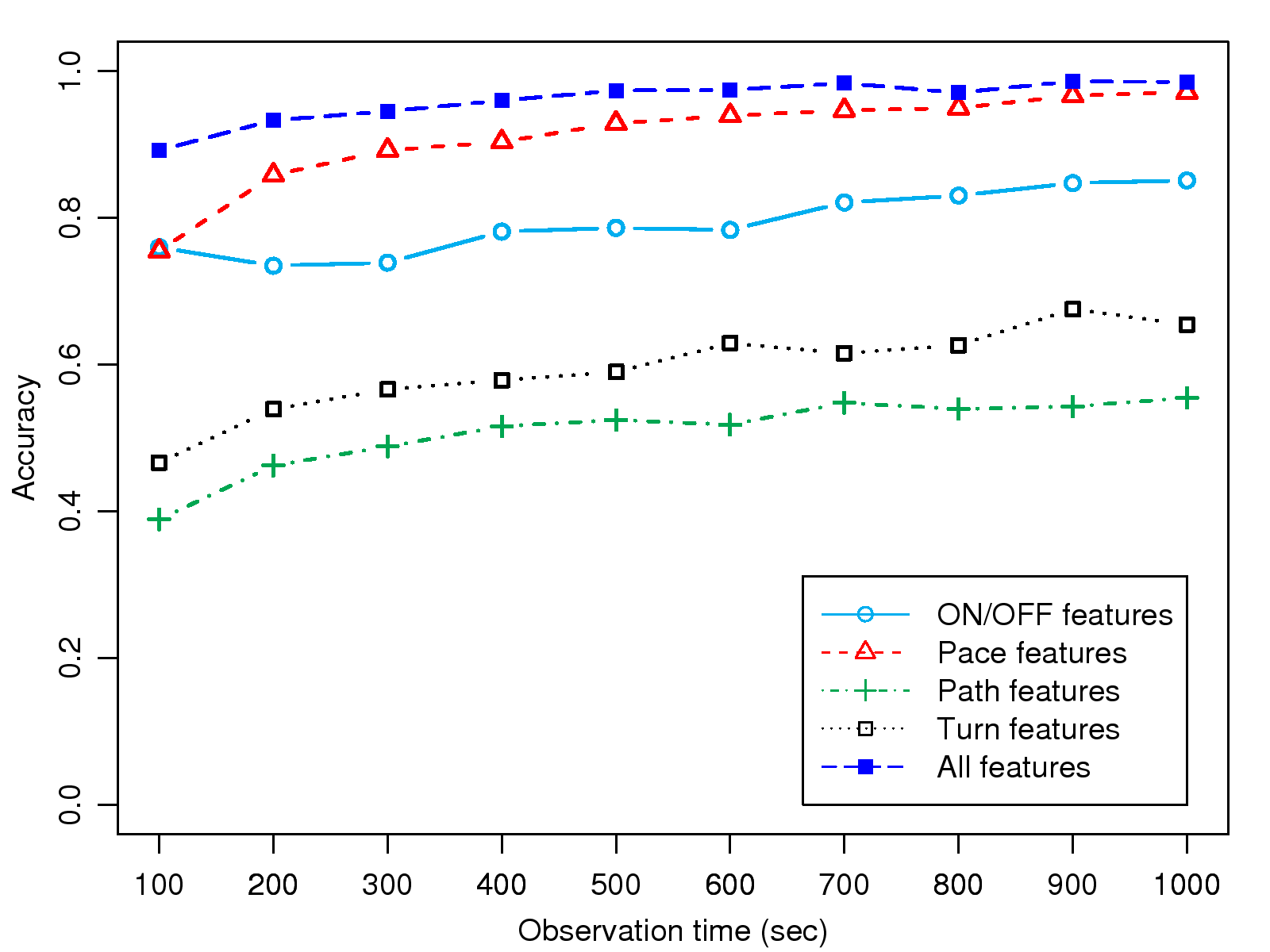
6 Performance Evaluation
In this section, we evaluate the performance of our proposed bot
detection scheme on the collected traces. First, we evaluate whether our
scheme can distinguish between human players and game bots, by using the
classifier to perform 10-fold cross-validation. In real-life
scenarios, the trace length plays an important role because it
determines how quickly a game bot can be detected. Thus, we evaluated
the performance of our scheme on different traces lengths, as shown in
Fig. 6. The graph shows that the detection accuracy is
higher than 90%, even when the trace length is as short as 100
seconds. Longer traces yield better accuracy. To determine which
category of features yields the highest accuracy, we plot the
classification performance for each category of features. The results
indicate that the features related to the movement pace, direction
changes, and ON/OFF periods all yield good results, while path-related
features only exhibit good discriminability when the trace length is
800 seconds or longer.
Figure 6: Classification accuracy between human and
bots.
Furthermore, we perform a player-type classification; that is, we not
only determine whether a character is controlled by a human player or a
bot program, but also identify the bot program used if appropriate. The
results are shown in Fig. 7. The classification
accuracy of the player types is even better than that of the human-bot
scenario when the trace length is longer than 200 seconds. With a
trace length of 500 seconds or longer, our scheme yields a
classification accuracy of 98% or higher. However, in this setting,
individual feature categories, except those related to movement paces,
exhibit low discriminability when they are applied to the classification
separately.
Figure 7: Classification accuracy between four types of
players (human and three bot programs).
7 Conclusion
We have proposed a trajectory-based approach for detecting game bots. It is a general technique that can be applied to any game in which the avatar's movement is controlled by the players directly. Our analysis of real-life traces shows that the trajectories of human players and game bots are very dissimilar. The performance evaluation results show that our bot detection scheme can achieve a detection accuracy of 95% or higher when the trace length is 200 seconds or
longer. Because it is difficult to simulate human players' behavior when controlling game characters, we believe our method has the potential to distinguish between human players and automated programs, and thus merits further investigation.
References
[1]
Golle, P., Ducheneaut, N.:
Preventing bots from playing online games.
Computers in Entertainment 3(3) (2005) 3-3
[2]
von Ahn, L., Blum, M., Hopper, N.J., Langford, J.:
CAPTCHA: Using hard AI problems for security.
In: Proceedings of Eurocrypt. (2003) 294-311
[3]
Novak, T.P., Hoffman, D.L., Duhachek, A.:
The influence of goal-directed and experiential activities on online
flow experiences.
Journal of Consumer Psychology 13(1) (2003) 3-16
[4]
Ila, S., Mizerski, D., Lam, D.:
Comparing the effect of habit in the online game play of australian
and indonesian gamers.
In: Proceedings of the Australia and New Zealand Marketing
Association Conference. (2003)
[5]
Chen, K.T., Jiang, J.W., Huang, P., Chu, H.H., Lei, C.L., Chen, W.C.:
Identifying MMORPG Bots: A Traffic Analysis Approach.
In: Proceedings of ACM SIGCHI ACE'06, Los Angeles, USA (Jun 2006)
[6]
Chen, K.T., Huang, P., Lei, C.L.:
Game Traffic Analysis: An MMORPG Perspective.
Computer Networks 50(16) (2006) 3002-3023
[7]
Yeung, S., Lui, J., Liu, J., Yan, J.:
Detecting cheaters for multiplayer games: theory, design and
implementation.
Proc IEEE CCNC 6 1178-1182
[8]
Malakhov, M.:
CR Bot 1.15 (May 2000) http://arton.cunst.net/quake/crbot/.[9]
Feltrin, R.R.:
Eraser Bot 1.01 (May 2000)
http://downloads.gamezone.com/demos/d9862.htm.[10]
jibe:
ICE Bot 1.0 (1998) http://ice.planetquake.gamespy.com/.
 (a) Human players
(a) Human players
 (b) CR Bot
(b) CR Bot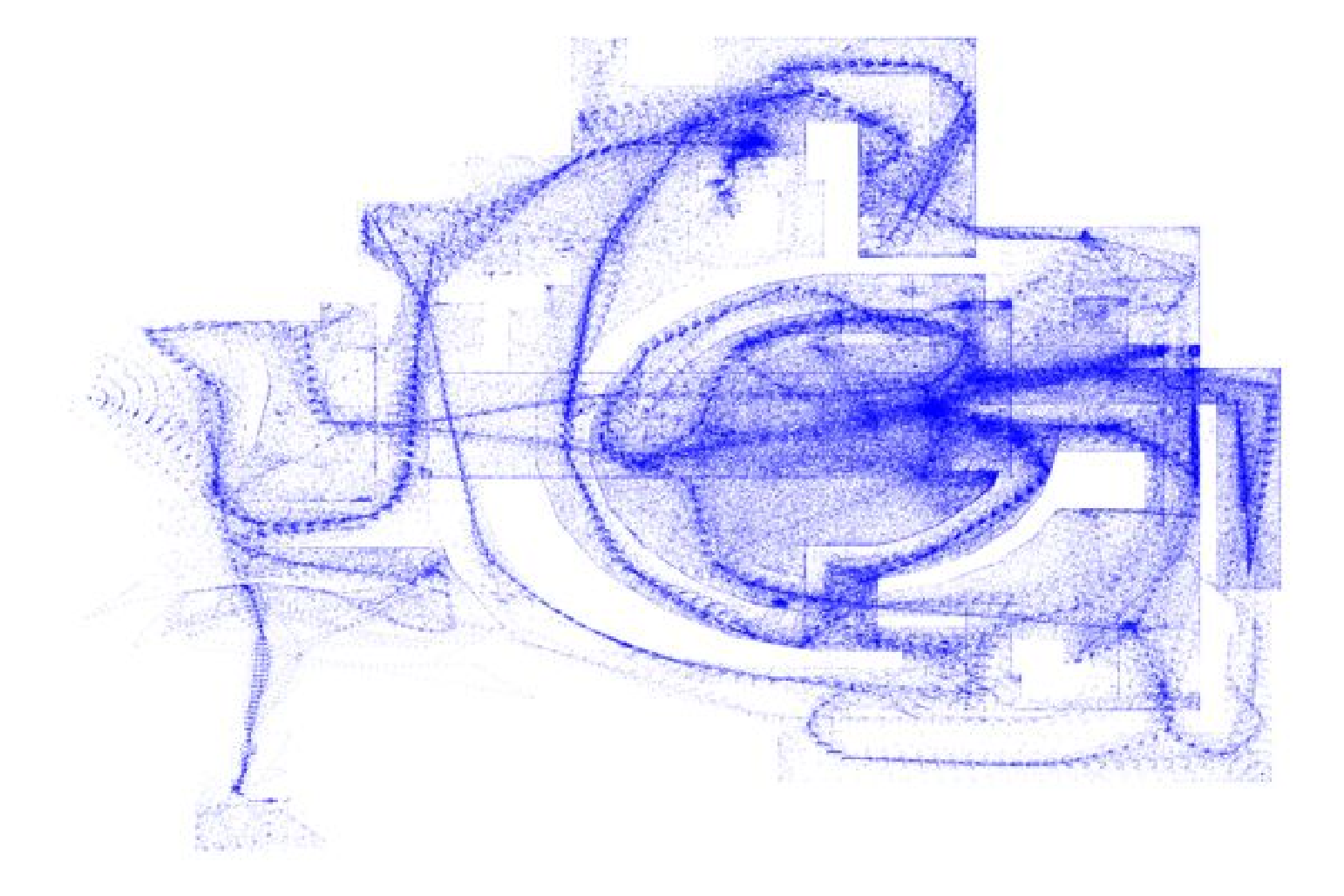 (c) Eraser Bot
(c) Eraser Bot
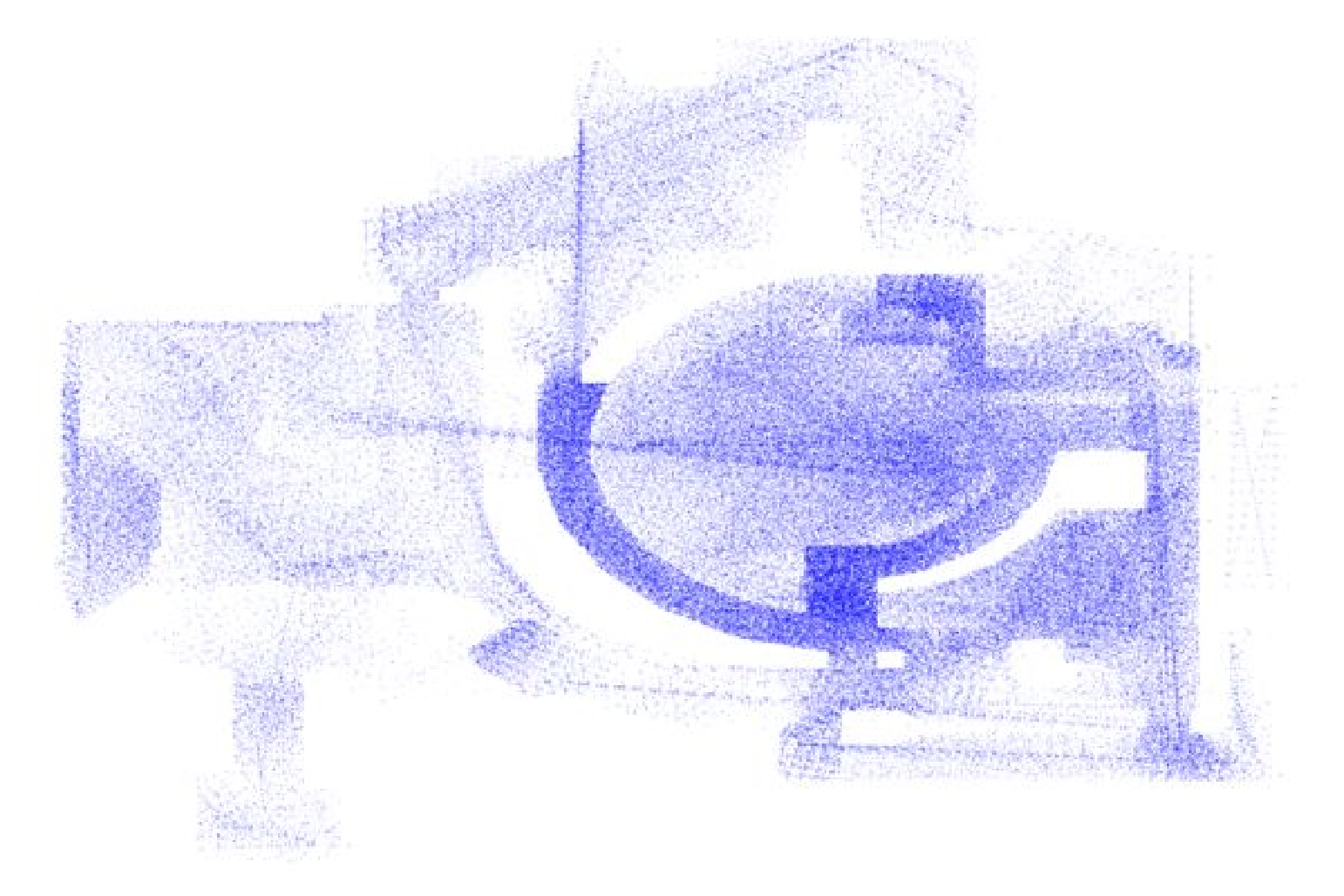 (d) ICE
Bot
(d) ICE
Bot