Page 48 - My FlipBook
P. 48
人
智慧
計
畫 深度學習於多媒體資料處理的相關研究及應用
Arti cial Intelligence Projects 計畫主持人:廖弘源博士
計畫期程:2018/1~2021/12
從 2018 年 開 始, 我 的 研 究 團 隊 開 始 接 受 科 技 部 式微。由於準備的時間短促,我們一開始就以多媒體訊
補 助, 啟 動 一 個 四 年 期 的 人 工 智 慧 相 關 研 究 計 畫 號資料處理結合深度學習做為題目。科技部擔心各研發
(2018/1~2021/12),每年的經費大約台幣 850 萬元。 團隊只以做純研究及發表論文做為計畫的目標,就表明
原本我們團隊的專長是多媒體訊號及資料處理,而科技 將是否能與台灣產業合作做為一項評估指標。其中一項
部也嘗試鼓勵各個不同訓練背景的研究團隊,由各個角 最重要的指標就是「業界出題,學界解題」。我的團隊
度切入人工智慧相關的理論或應用研究,因為科技部已 於是選擇上市的 IC 公司義隆電子合作,希望能整合各自
看出這是一個未來非常重要的方向,如果此時不挹注經 擅長的軟硬體優勢,發展不僅能適用於台灣,且能輸出
費投入,未來台灣不管在科學上或產業上的競爭力勢必 國際的「智慧城市交通車流解決方案」。
我們的目標是完成下列項目:
一、在十字路口直接執行邊緣運算 (edge computing),計算出車流的各項參數;
二、利用電腦視覺的技術,計算鄰近路口之間其他的車流參數,例如:車速、停等車列長度;
三、利用前述獲得之交通流量參數,用增強式學習 (reinforcement learning),動態調整被某一範圍涵蓋的所有十字路口
之交通號誌。
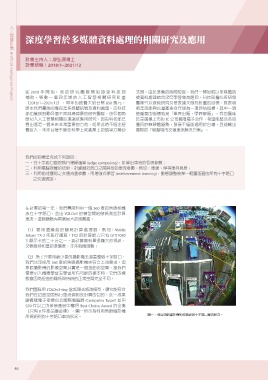
在計畫的第一年,我們團隊利用一個 360 度的魚眼相機 圖一:利用魚眼攝影機所偵測到的十字路口車流狀況。
放在十字路口,並由 YOLOv3 的模型開始做偵測並計算
車流。這個議題有兩個最大的困難處:
(1) 要 用 邊 緣 端 的 簡 易 計 算 處 理 器, 例 如:Nvidia
Jetson TX-2 來執行運算。TX2 的計算能力只有 GTX1080
Ti 顯示卡的二十分之一,要計算資料量很龐大的視訊,
又要維持相當的準確度,本來就極困難;
(2)為了只要用最少量的攝影機去涵蓋整個十字路口,
我們決定採用 360 度的魚眼攝影機來符合上述要求。但
魚眼攝影機的影像空間其實是一個扭曲的空間,當我們
需要引入機器學習去學習所有可能的樣本時,它們的樣
態會因為扭曲的關係與傳統的正常空間完全不同。
我們團隊用 YOLOv3-tiny 當起頭去修改模型,讓它能符合
我們在扭曲空間執行車流偵測及計算的目的。此一成果
讓義隆電子參展台北國際電腦展 (Computex Taipei) 並由
550 件以上的參展產品中奪得 Best Choice Award 的金獎
(只有 8 件產品獲金獎)。圖一所示為利用魚眼攝影機
所偵測到的十字路口車流狀況。
46
智慧
計
畫 深度學習於多媒體資料處理的相關研究及應用
Arti cial Intelligence Projects 計畫主持人:廖弘源博士
計畫期程:2018/1~2021/12
從 2018 年 開 始, 我 的 研 究 團 隊 開 始 接 受 科 技 部 式微。由於準備的時間短促,我們一開始就以多媒體訊
補 助, 啟 動 一 個 四 年 期 的 人 工 智 慧 相 關 研 究 計 畫 號資料處理結合深度學習做為題目。科技部擔心各研發
(2018/1~2021/12),每年的經費大約台幣 850 萬元。 團隊只以做純研究及發表論文做為計畫的目標,就表明
原本我們團隊的專長是多媒體訊號及資料處理,而科技 將是否能與台灣產業合作做為一項評估指標。其中一項
部也嘗試鼓勵各個不同訓練背景的研究團隊,由各個角 最重要的指標就是「業界出題,學界解題」。我的團隊
度切入人工智慧相關的理論或應用研究,因為科技部已 於是選擇上市的 IC 公司義隆電子合作,希望能整合各自
看出這是一個未來非常重要的方向,如果此時不挹注經 擅長的軟硬體優勢,發展不僅能適用於台灣,且能輸出
費投入,未來台灣不管在科學上或產業上的競爭力勢必 國際的「智慧城市交通車流解決方案」。
我們的目標是完成下列項目:
一、在十字路口直接執行邊緣運算 (edge computing),計算出車流的各項參數;
二、利用電腦視覺的技術,計算鄰近路口之間其他的車流參數,例如:車速、停等車列長度;
三、利用前述獲得之交通流量參數,用增強式學習 (reinforcement learning),動態調整被某一範圍涵蓋的所有十字路口
之交通號誌。
在計畫的第一年,我們團隊利用一個 360 度的魚眼相機 圖一:利用魚眼攝影機所偵測到的十字路口車流狀況。
放在十字路口,並由 YOLOv3 的模型開始做偵測並計算
車流。這個議題有兩個最大的困難處:
(1) 要 用 邊 緣 端 的 簡 易 計 算 處 理 器, 例 如:Nvidia
Jetson TX-2 來執行運算。TX2 的計算能力只有 GTX1080
Ti 顯示卡的二十分之一,要計算資料量很龐大的視訊,
又要維持相當的準確度,本來就極困難;
(2)為了只要用最少量的攝影機去涵蓋整個十字路口,
我們決定採用 360 度的魚眼攝影機來符合上述要求。但
魚眼攝影機的影像空間其實是一個扭曲的空間,當我們
需要引入機器學習去學習所有可能的樣本時,它們的樣
態會因為扭曲的關係與傳統的正常空間完全不同。
我們團隊用 YOLOv3-tiny 當起頭去修改模型,讓它能符合
我們在扭曲空間執行車流偵測及計算的目的。此一成果
讓義隆電子參展台北國際電腦展 (Computex Taipei) 並由
550 件以上的參展產品中奪得 Best Choice Award 的金獎
(只有 8 件產品獲金獎)。圖一所示為利用魚眼攝影機
所偵測到的十字路口車流狀況。
46